PinnedPublished inTDS ArchiveDifferent Normalization Layers in Deep LearningPresently Deep Learning has been revolutionizing many subfields such as natural language processing, computer vision, robotics, etc. Deep…Dec 10, 20201Dec 10, 20201
PinnedPublished inTDS ArchiveSelf-Supervised Learning Methods for Computer VisionWhat is Self-supervised Learning?Dec 15, 20201Dec 15, 20201
Published inTDS ArchiveNon-Linear Augmentations For Deep LearningIn recent years, deep learning has made tremendous progress in developing systems that can learn from carefully labelled data.Mar 13, 20211Mar 13, 20211
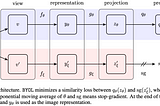
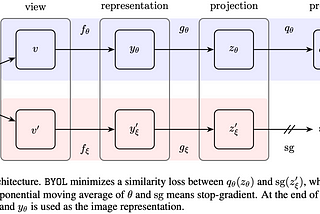
Published inTDS ArchiveHands on Review: BYOL(Bootstrap Your Own Latent)Lately, Self-supervised learning methods have become the cornerstone for unsupervised visual representation learning. One such method…Jan 2, 2021Jan 2, 2021
Published inTDS ArchiveDistributed Neural Network Training In PytorchWith several advancements in Deep Learning, complex networks such as giant transformer networks, wider and deeper Resnets, etc. have…Dec 25, 20202Dec 25, 20202
Camera Image Perspective Transformation to different plane using OpenCVObjects In Mirror Are Closer Than They AppearDec 20, 2020Dec 20, 2020